[TOC]
:smile:
Techniques to do
☐ 2D object detection
☐ Image-based 3D object detection
☐ Depth estimation
☐ Point cloud based 3D object detection
☐ Image & Point cloud fusion based 3D object detection
3D Object Detection from Images forAutonomous Driving: A Survey
l https://github.com/xinzhuma/3dodi-survey
l Depth estimation & 3D object detection trained together.
An Overview Of 3D Object Detection
l image & point cloud based three dimentional detection

A Review of 3D Object Detection for Autonomous Driving ofElectric Vehicles

l 融合的多模态方案 + 多帧 解决遮挡问题
Point Cloud Processing
github
https://github.com/mmolero/awesome-point-cloud-processing
Tutorials
[3D Deep Learning on Point Cloud Data](http://graphics.stanford.edu/courses/cs468-17-spring/LectureSlides/L16 - 3d deep learning on point cloud (analysis) and joint embedding.pdf)
Libraries
l PCL - Point Cloud Library is a standalone, large scale, open project for 2D/3D image and point cloud processing.
l open3d http://www.open3d.org/docs/release/introduction.html
l Matlab https://ww2.mathworks.cn/help/vision/point-cloud-processing.html
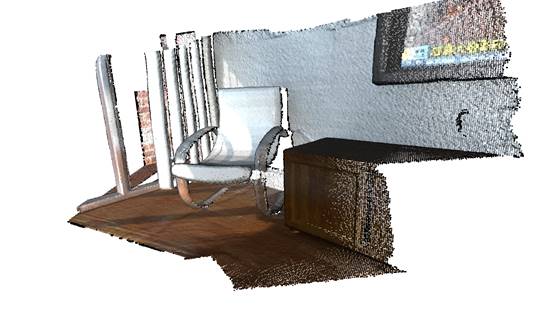
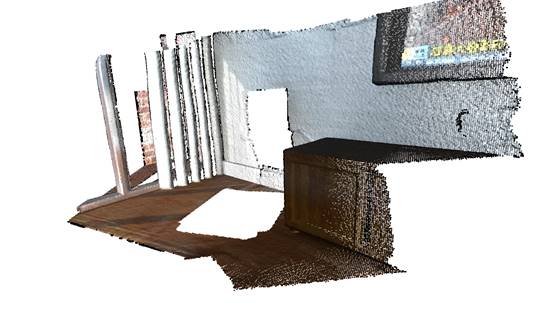
Open3d Point cloud
1 Visualize point cloud
read_point_cloud 读取点云文件
draw_geometries 可视化点云几何结构
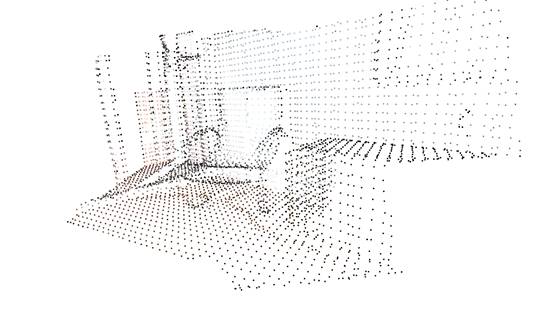
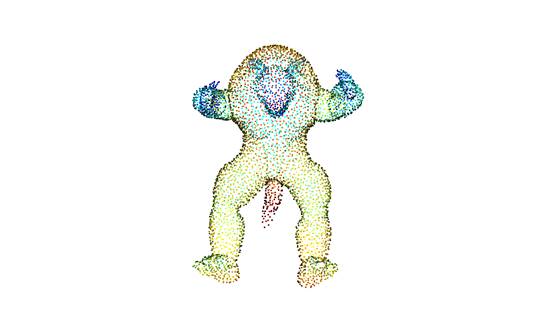
2 Voxel downsampling
由于读取的点云一般比较dense,计算时间长,所有需要点云下采样稀疏sparse
a) Points are bucketed into voxels. 点云分桶到体素中
b) Each occupied voxel generates exactly one point by averaging all points inside. 每个体素平均后取一个点
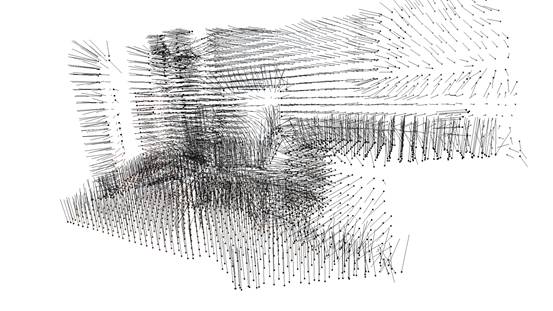
3 Vertex normal estimation
估计每个顶点的法向,可以随机或指定法向中的某一个方向
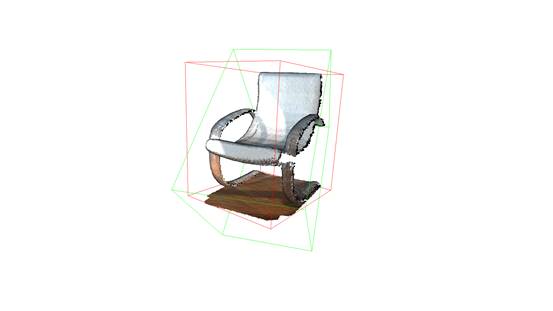
4 Crop point cloud
通过3d bbox将点云进行crop

5 Paint point cloud
给点上色

6 Point cloud distance
计算2个点云之间的距离
7 Bounding volumes
边界体积
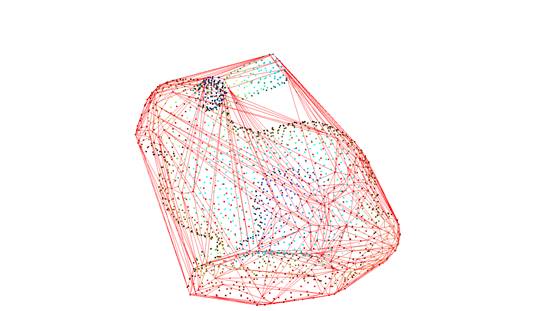
8 Convex hull
凸包
9 DBSCAN clustering
聚类

10 Plane segmentation
计算平面法方程Ax+By+Cz+D=0, 平面分割

11 Hidden point removal
去除某个视角下背面点
 |
 |
|---|---|
[3D Deep Learning on Point Cloud Data](http://graphics.stanford.edu/courses/cs468-17-spring/LectureSlides/L16 - 3d deep learning on point cloud (analysis) and joint embedding.pdf)
PointNet PointNet++
分类 部位分割 场景解析




