Observation-Centric SORT:
Rethinking SORT for Robust Multi-Object Tracking
Abstract
- Kalman fileter (KF) 假设目标是线性运动(刚体),但是在遮挡和长时间的线性运动下非常不准确。由于会信任这种线性运动的prior,在遮挡的时候会累计误差,从而出现运动方向的方差很大。
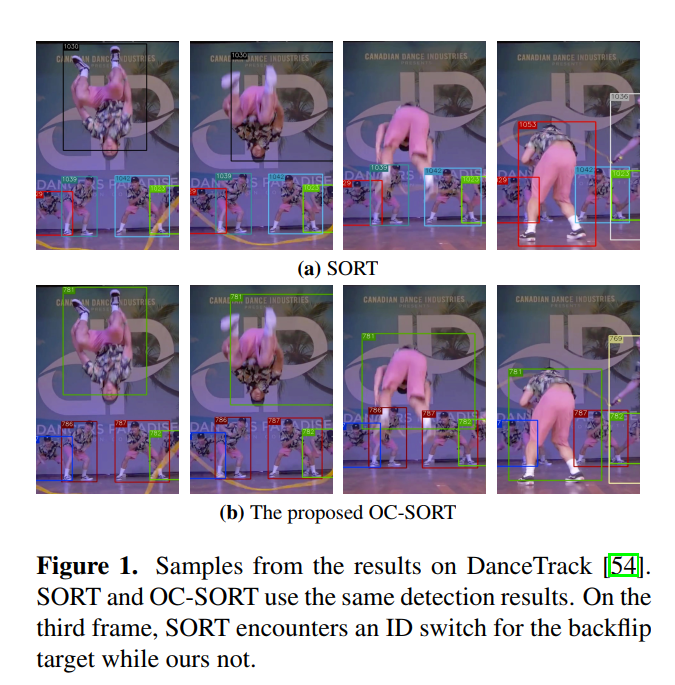
- 本文Observation-Centric SORT (OC-SORT) 在KF基础上,利用detector计算遮挡时虚拟轨迹,修正遮挡产生的累计误差。在遮挡和非线性运动下,取得了2022年的SOTA。
Related Works
Motion Models
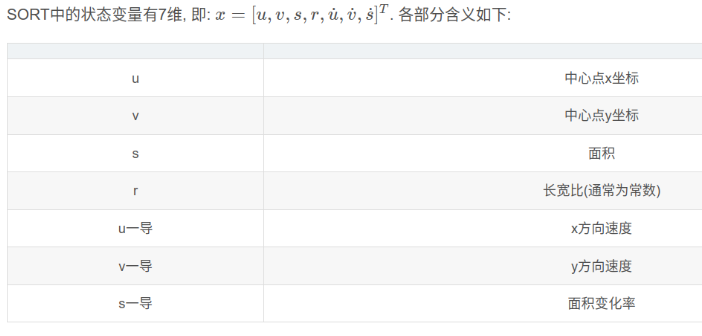
- KF 按照预测-更新循环的递归贝叶斯滤波器
Multi-object Tracking
- SORT
- DeepSORT
- Transformer: 性能低于tracking-by-detection
Contributions
- Estimation-Centric 变成 Observation-Centric 降低KF的误差
- OOS(Observation-centric Online Smoothing):减少KF带来的累积误差
- OCM(Observation-centric Momentum):在代价矩阵中加入轨迹的方向一致性,更好地实现匹配
- OCR(Observation-centric Recovery):恢复由于遮挡造成的跟丢问题
Methodology
Overview
- KF固有局限性(SORT limitations)
- Sensitive to State Noise
- Temporal Error Magnification
- Estimation-Centric
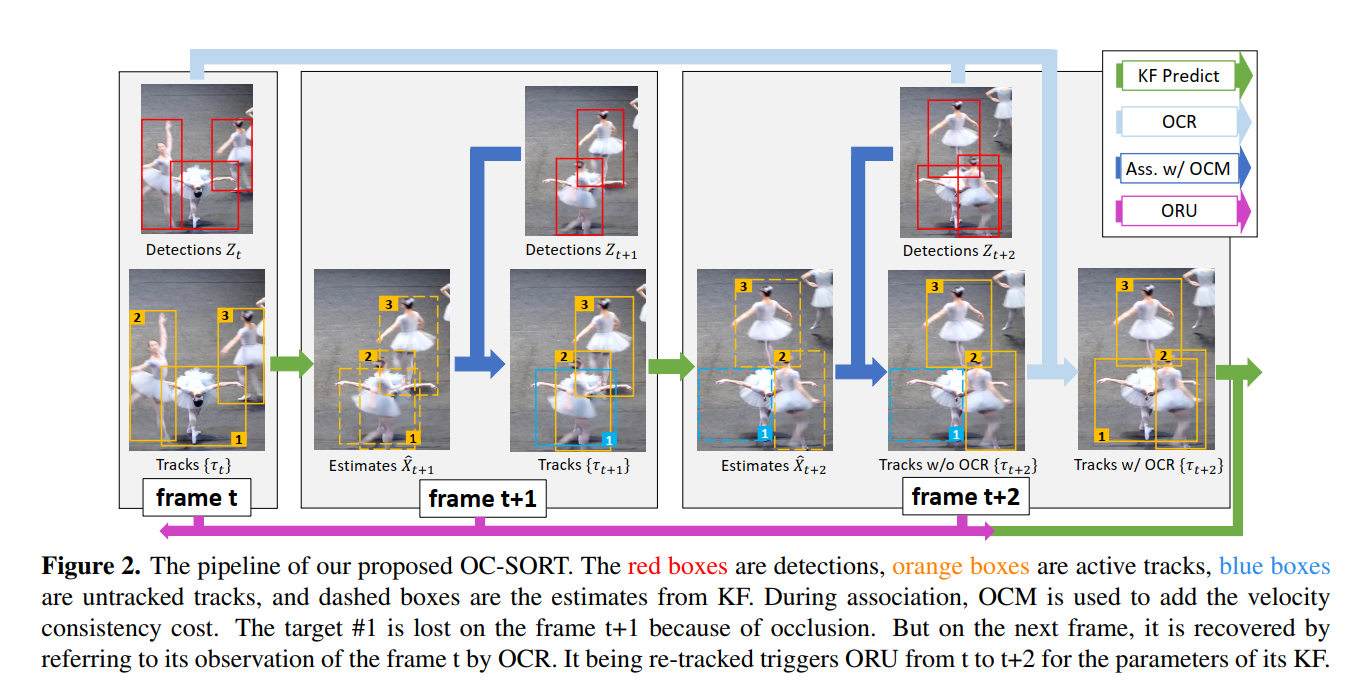
Observation-centric Re-Update (ORU)
- WHY
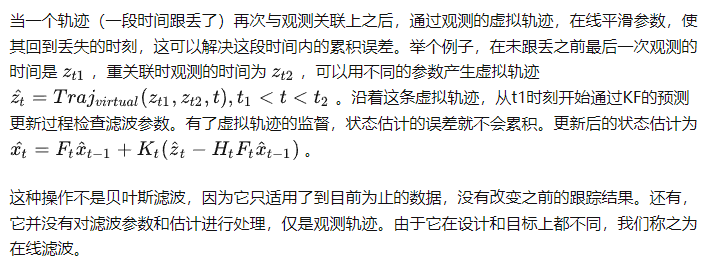
- 在track重激活(本来track,由于遮挡,没有了track,后来没被遮挡又被track)会由于时间累计误差放大,KF任然会lost该目标
- HOW
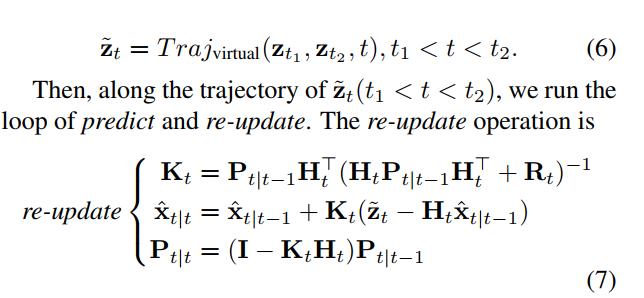
- 提出ORU,针对重激活,利用遮挡untrack这段时间的检测更新KF参数预测虚拟轨迹,降低累计误差。
- ORT作为predict-update独立分支,只对re-activate触发,其它情况不用
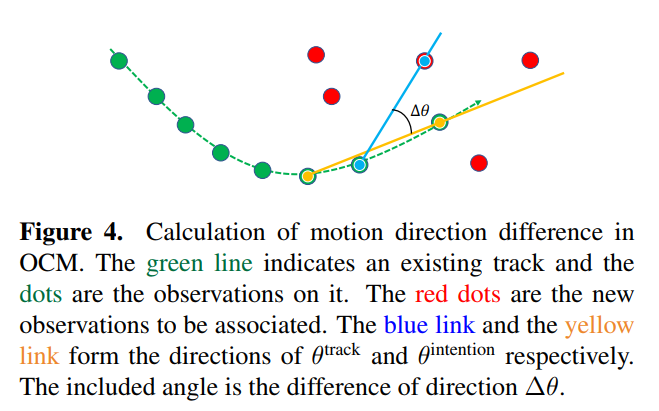
Observation-Centric Momentum (OCM)
- WHY
- 当时间间隔t很短,我们近似运动是线性的,而线性运动的假设要求运动方向的连续性
- 当t很小,速度噪声很明显
- 当t很大,方向估计噪声很明显(因为时间误差放大和线性运动假设失效)
- 当时间间隔t很短,我们近似运动是线性的,而线性运动的假设要求运动方向的连续性
- HOW
- 提出观察来降低运动方向计算噪声,同时提出连续项loss增加关联
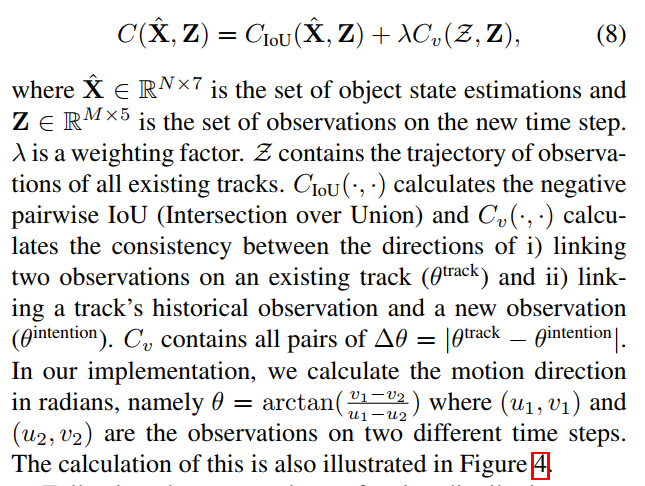
- t需要trade-off, 增加t可以降低noise,但是需要满足线性运动时间短假设
Observation-Centric Recovery (OCR)
- 针对目标停止或者短时间遮挡情况,在正常association stage之后,增加第二关联阶段,对没有匹配的track和detection进行关联
Experiments
Code
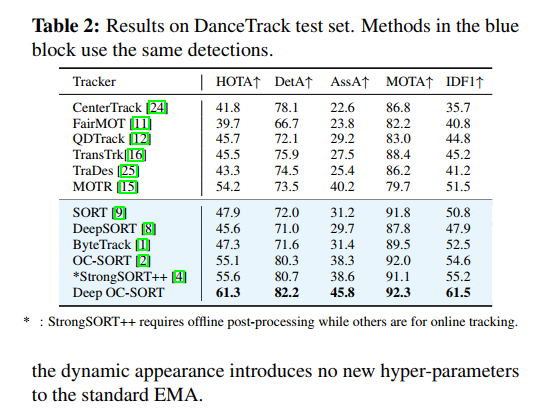
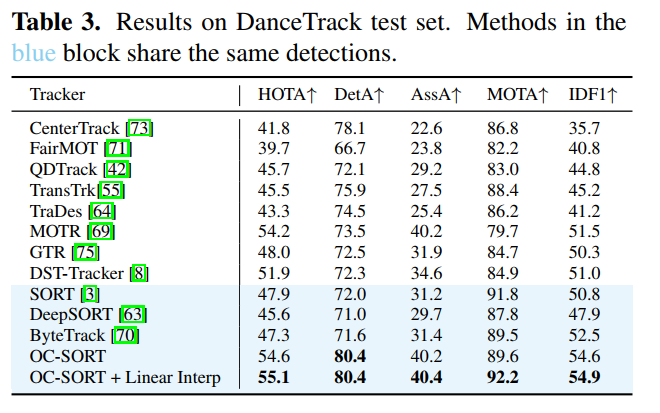
Result
Conclusions
The gain is especially significant for multi-object tracking under occlusion and non-linear object motion.
References
- Deep OC-SORT: Multi-Pedestrian Tracking by Adaptive Re-Identification